安装在一只绿甲虫身上的压电装置得到了115µW的发电量
长期以来工程师们一直致力于研发微型飞行器,其体型就跟昆虫差不多。但是在经过长期研究后工程师们逐渐意识到这样做面临的巨大困难,他们需要设计出一种微小的轻型飞行器,还能携带一定重量的载荷飞行,依靠高性能电池进行长时间的稳定供电,这几乎是一个不可逾越的挑战。因此现在有一些工程师们开始另辟蹊径,放弃独立开发全机械系统,转而设法利用真实的昆虫本身,只是要对它们动一些手脚。
比如在它们的触角附近安装微型刺激体,在它们的中枢神经系统内部或神经肌肉连接处植入电极等等。研究人员发现这样可以实现对昆虫大脑的操控,这样就得到了一个“僵尸”昆虫机器人。
美国密歇根大学教授艾森・阿肯-阿克塔卡(Ethem Erkan Aktakka)告诉记者说:“尽管近些年在微型飞行器设计方面取得了长足的进展,但是考虑到其空气动力学表现,悬空时间,载荷能力以及微观尺寸上的节能性能,这些设计都是无法与这种‘僵尸’昆虫机器人相比的。”他说:“人类依靠现有的技术是无法挑战后者的,因为这是大自然经过千万年进化后得到的结果。”
到目前为止,应用于昆虫体内的操纵系统仍然是靠电池供电的。但是现在-阿克塔卡和合作者一起研发出了一种节能装置,它能依靠昆虫扇动翅膀的动作发电。他们在昆虫的两个翅膀上各安装一个这样的节能装置,运用压电效应产生45 µW的电量。并且研究人员们相信,一旦将发电机组与昆虫体内的运动肌肉实现直接连接,这种发电效率将得到指数级提升。
有关这一研究的论文已经发表于最近一期《细观力学与微工程杂志》,这标志着科学家首次开始尝试采用非共振装置技术从活体昆虫身上收集电能。在此之前科学家们再昆虫身上收集电能的尝试包括使用温差电偶来借助昆虫的体温发电,以及使用磁谐振装置来收集因昆虫身体颤动产生的电能。除此之外太阳能也是一个备选能源方案,不过这样做的话其应用便会被限制在阳光明媚的室外。由于先前的尝试中发现,不同昆虫个体在飞行中拍动翅膀的频率存在很大的差异,甚至同一只昆虫在不同情况下拍动翅膀的频率也有很大不同,因此科学家们得出结论,必须使用非共振装置设计,这样才能收集到尽可能多的电能。
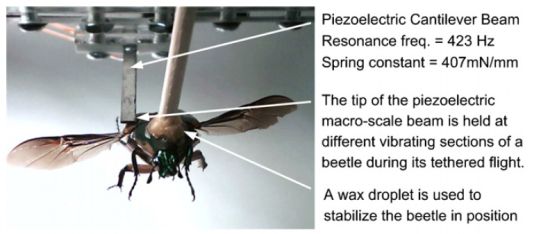
现在,科学家们开始尝试在昆虫的胸廓和翅鞘位置安装压电悬臂梁和压电扭转梁机构。这种装置可以在85-105 Hz的频率下工作,这正是科学家们用作实验的绿甲虫的翅膀扇动频率变化范围。压电扭转梁机构显示最高发电量接近45 µW,而压电悬臂梁的发电量大致仅为其一半或更少。测试显示,发电装置的安装位置距离昆虫的飞行肌越近,昆虫扇动翅膀产生的机械能转化为电能的效率便越高,因为飞行肌正是昆虫扇翅震动的来源。在采用一个更大些的压电装置之后,研究人员得到了最佳115 µW的发电量。
阿克塔卡说:“现成的设备帮助我们得以进行实际测试,并可以在同种昆虫的不同个体上进行比较测试。这些装置的重量远低于之前使用的共振发电装置。现在,不管昆虫扇动翅膀的频率如何改变,周遭的环境,如光照或温度如何变化,我们总能得到较高水平的发电量,”
研究人员们指出,这种“僵尸”昆虫飞行器将具备和微型机械飞行器同样的功能,包括执行搜索和营救任务,灾害环境侦察监视以及爆炸物侦测等等。
阿克塔卡说:“目前,我们正在努力开发一种新的微安装技术,它将让我们得以将压电陶瓷整合进传统的半导体加工技术中去。和传统的薄膜沉积工艺相比,这一新技术将极大地提升微型震动能的采集效率。同时我们也正在继续跟进电源再充电或超级电容技术的开发。”这项技术的研制工作得到了美国国防部先进项目研究计划局(DARPA)的资助。