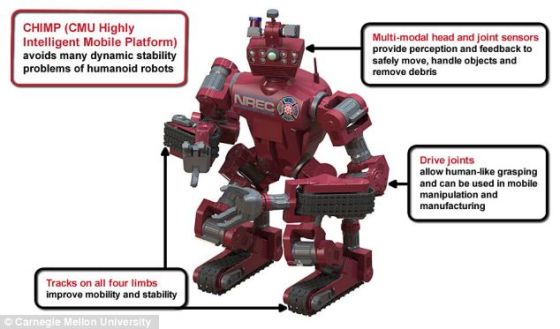
美国卡内基-梅隆大学研制的四肢机器人“高智能移动平台”(CHIMP),拥有与人类相当的力量,可以爬梯子或者使用工具。这款机器人将参加美国国防高级研究计划局的机器人挑战赛,争夺200万美元奖金

CHIMP的四肢装有履带,能够像坦克一样行进,应对崎岖路面

CHIMP装有三指操纵器,可以爬梯子,移动碎片,或者可以转动方向盘

需要的时候,CHIMP也可利用两肢上的履带移动,例如在必须使用一个或者更多肢体打开阀门或者操作电动工具的时候
据国外媒体报道,美国卡内基-梅隆大学研制了一款人类大小的新型机器人,能够行走,攀爬梯子,甚至能够变身为坦克,穿过崎岖的路面,堪称现实版变形金刚。这款机器人名为“高智能移动平台”(以下简称CHIMP),变身坦克是其最大特点,以利用履带应对不平坦路面。
需要的时候,CHIMP可以站立,甚至能够利用“爪子”攀爬梯子和建筑,抓住汽车的方向盘。CHIMP还可以变身,利用四肢上的履带,像坦克一样行进。这种变身赋予它出色的行动能力,能够应对满是碎片或者崎岖不平的路面。需要的时候,CHIMP也可利用两肢上的履带移动,例如在必须使用一个或者更多肢体打开阀门或者操作电动工具的时候。
CHIMP能够执行复杂的挑战身体能力的任务。操作人员可以远程控制下达指令,控制这款机器人的路线和行动。此外,这款机器人还搭载智能装置,避免相撞,保持平衡,防止自己遭到伤害。CHIMP可以预编程,让它执行特定的任务,例如抓取工具,攀爬梯子或者转动方向盘,无需操作人员一步步指导它完成这些任务,缩短从下达命令到执行所需的时间。
卡内基-梅隆大学的国家机器人技术工程中心负责人和塔尔坦营救小组组长托尼-斯特兹表示:“人类操作人员下达高级指令,CHIMP进行低级反射和自保护行为。虽然没有自治机器人那么复杂,CHIMP同样具有很高的任务执行能力。这种机器人拥有巨大潜力。”
CHIMP将参加美国国防高级研究计划局的机器人挑战赛。参加这项比赛的机器人需要具备一系列与人类类似的能力,执行灾后救援任务,例如2011年的福岛第一核电站事故。在灾区环境下,救援机器人将面临各种挑战,需要具备爬梯子和在障碍中操纵车辆等能力。国防高级研究计划局为DRC Track A比赛挑选了7支研究团队,研发机器人软件和硬件,国家机器人技术工程中心便是其中之一。
CHIMP拥有出色的静稳定性,即使在出现电脑故障或者电力故障情况下也不会摔倒。斯特兹表示:“行走或者站立时,我们的大脑始终控制着我们的身体平衡。这种动态平衡让人拥有很高的敏捷性,可以奔跑。”必要的时候,操作人员可以控制CHIMP的单个关节,以适应特定的环境或者在紧要关头脱险。“在紧要关头,它会做任何事情。”