10月30日,三名研发者对仿生蝗虫机器人的跳跃过程进行检测。
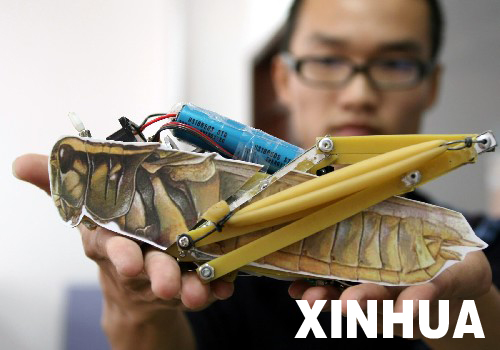
10月30日,研发者在展示仿生蝗虫机器人。
近日,哈尔滨工程大学三位大学生研发出仿生蝗虫机器人。这种机器人根据蝗虫跳跃的仿生学理论设计,由连杆机构实现对蝗虫腿部的仿生设计,以较小功耗实现跳跃。
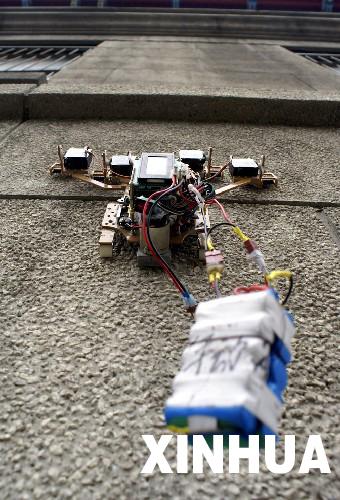
10月30日,钩爪式爬壁机器人在攀爬墙壁。
10月30日,设计者在展示钩爪式爬壁机器人。
哈尔滨工程大学的几名大学生近日研制出了一种钩爪式爬壁机器人。这种钩爪式爬壁机器人利用钩刺贴附于粗糙墙壁表面,通过对手臂伸缩和交替速度的控制实现爬行,有一定实用前景。